Equivalence between fuzzy logic
controller and PD controller
A.
Traditional PD Control Design: Example_PD.mdl
(Example 9.5 in “Control Systems Engineering,
5th edition, Nice, pp. 464.” )
Chao, Chun-Tang
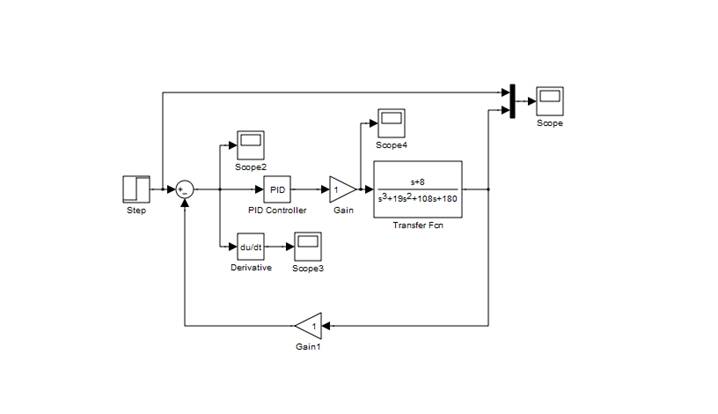
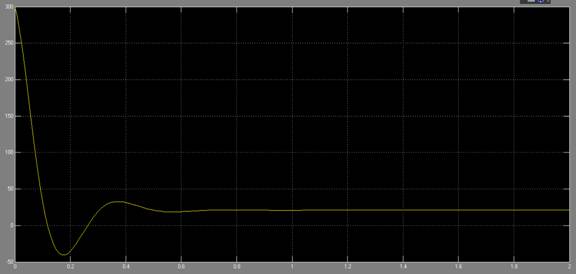
Kp=298.6, Ki=0, Kd=5.34
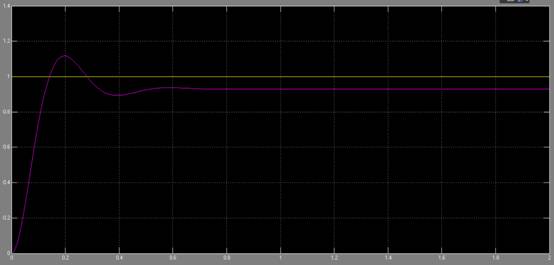
Command and Output
(Scope):
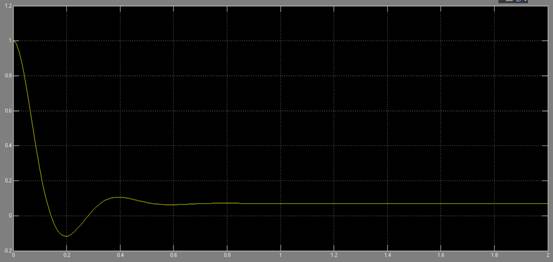
Error (Scope2):
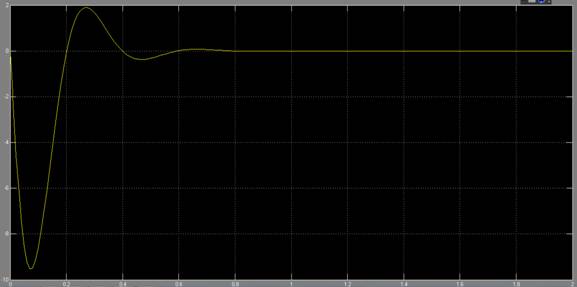
Derivative of Error (Scope3):
Controller Output (Scope4):
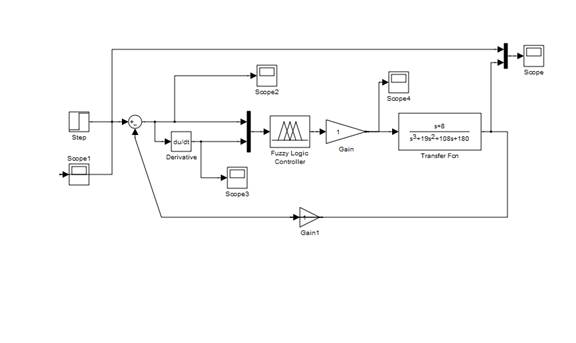
B. FLC Design: Example_fuzzy1.mdl fuzzy1.fis
by
阮氏懷南 (HoaiNam_ Nguyen)
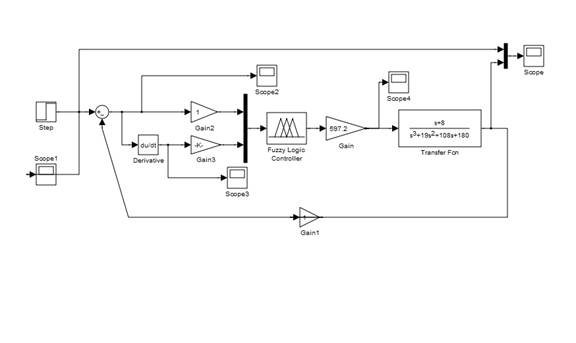
C. FLC Design with scaling factors: Example_fuzzy2.mdl fuzzy2.fis
by 阮氏懷南
(HoaiNam_ Nguyen)
Note: Example_fuzzy1.mdl
不能直接執行。必須先在Matlab下執行
>> fuzzy1=readfis('fuzzy1'); %右式的 fuzzy1, 是指 fuzzy1.fis; 左式的 fuzzy1, 見Example_fuzzy1.mdl中,FLC功能方塊中定義。
將 fis 檔,轉換成模糊推論矩陣,以讓功能方塊呼叫得到。
※ C.C. Teng*, “Equivalence between fuzzy logic controller and PD controller,” Journal of Chinese Fuzzy Systems Association, vol.2, no.1, pp. 23-28, 1996. (鄧清政,古典控制器與模糊控制器之等值關係,模糊系統學刊,第二卷,第一期,第23-28頁,1996 – 導讀文獻)
![]() http://faculty.stust.edu.tw/~tang/project/paper/09_Equivalence_FLC.pdf
http://faculty.stust.edu.tw/~tang/project/paper/09_Equivalence_FLC.pdf