Arduino ≥sĪĶADXL330 §T∂b•[≥t≠p(Three-Axis Accelerometer)
²
įÚ•Ľ•\°G¶bĺ«≤Ŗ•Ľ®“√D§ßęe°AĪzņ≥ł”ĻÍ≤ŖßĻ•H§UĹm≤Ŗ°G
1. •iŇ‹Ļq™żĪĶ§W5VĻqņ£°A≤£•Õ0~5V√Ģ§ŮĻqņ£°AßQ•őArduino™ļADC •\Įŗ(10 bits)°A¬ŗī궮§Q∂i¶ž 0~1023 ľ∆≠»
2. •iŇ‹Ļq™żĪĶ§W3.3VĻqņ£°A≤£•Õ0~3.3V√Ģ§ŮĻqņ£°AßQ•őArduino™ļADC •\Įŗ(10 bits)°AĶ≤¶XAREFĪĶł}≥]©w°A¬ŗī궮§Q∂i¶ž 0~1023 ľ∆≠»°C
•Ľ®“∂}©l
²
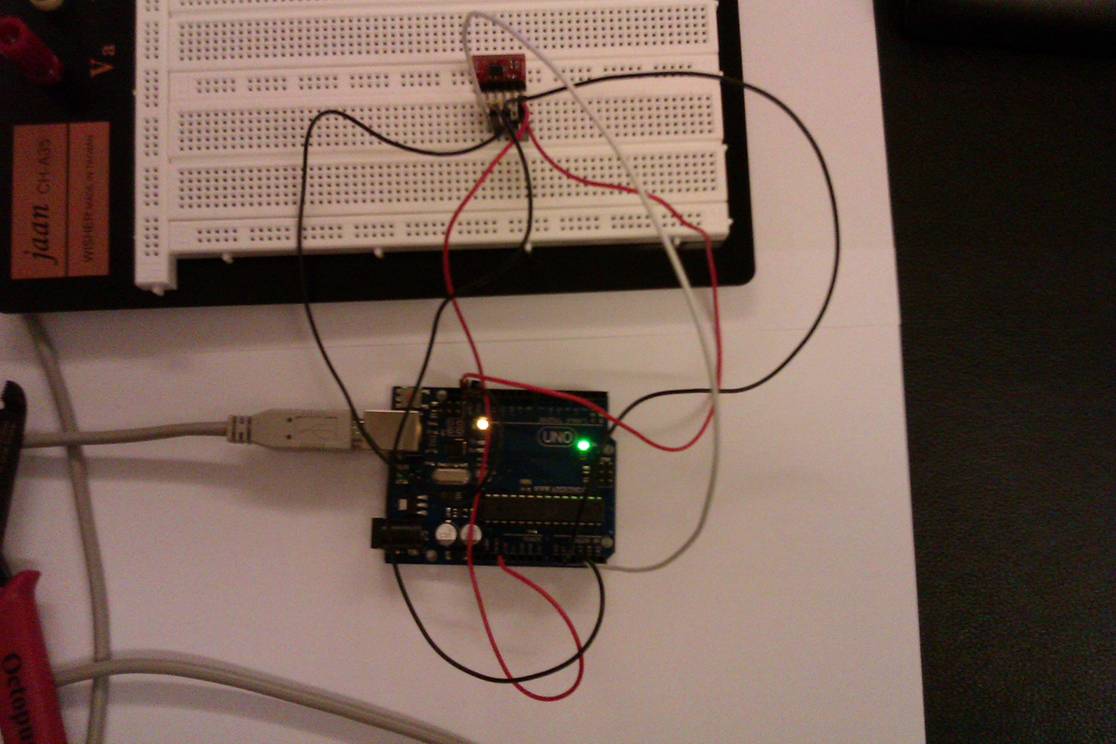
ĻqłŰ≥sĪĶ°G
Ľ°©ķ°G Arduino UNO ™O§W™ļ
3.3VĪĶł}°AĪĶ®žADXL330™ļ °•+°¶ ł}°A•H§őArduino
UNO ™O§W™ļAREFĪĶł}°CADXL330™ļ °•X°¶ °•Y°¶ °•Z°¶ §T∂bŅť•X°A§ņßOĪĶ®žArduino UNO ™O§W™ļAnalog In A1, A2, §ő A3 ĪĶł}°C
ĻŌ1
²
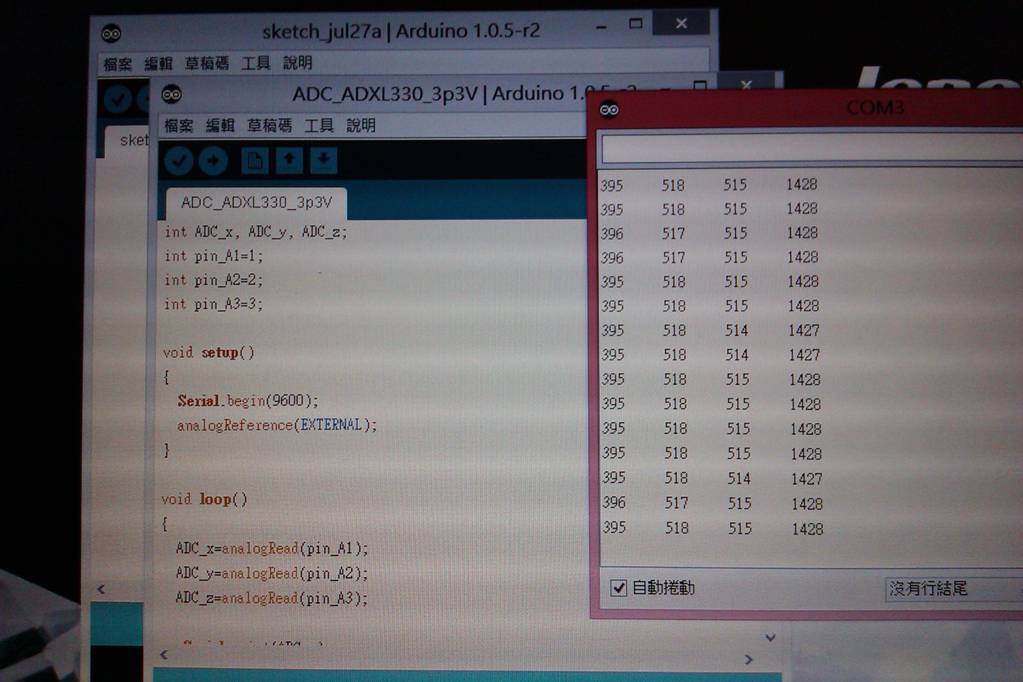
Ķ{¶°°G
int ADC_x, ADC_y, ADC_z;
int pin_A1=1;
int pin_A2=2;
int pin_A3=3;
void setup()
{
Serial.begin(9600);
analogReference(EXTERNAL);
}
void loop()
{
ADC_x=analogRead(pin_A1);
ADC_y=analogRead(pin_A2);
ADC_z=analogRead(pin_A3);
Serial.print(ADC_x);
Serial.print("\t");
Serial.print(ADC_y);
Serial.print("\t");
Serial.print(ADC_z);
Serial.print("\t");
Serial.print(ADC_x+ADC_y+ADC_z);
Serial.println();
delay(500);
}
²
įű¶śĶ≤™G°G
Case 1: ĻŌ1ń—•]™O°A§Ű•≠łm©ůģŗ§W
ĻŌ2
Case 2: ĻŌ1ń—•]™O•™§Ť©Ôį™¨ý30ę◊°AĶo≤{ľ∆≠»ßÔŇ‹°AĮų¶C•X§@≤’ľ∆ĺŕ°G
402 478 514
1394
Case 3: ĻŌ1ń—•]™O•k§Ť©Ôį™¨ý30ę◊°AĶo≤{ľ∆≠»ßÔŇ‹°AĮų§U¶C•X§@≤’ľ∆ĺŕ°G
399 554 532
1485
Case 4: ĻŌ1ń—•]™OĻŌ§ý§W§Ť®ļ§@ļ›©Ôį™¨ý30ę◊°AĶo≤{ľ∆≠»ßÔŇ‹°AĮų§U¶C•X§@≤’ľ∆ĺŕ°G 401 518 478
1397
Case 5: ĻŌ1ń—•]™OĻŌ§ý§U§Ť®ļ§@ļ›©Ôį™¨ý30ę◊°AĶo≤{ľ∆≠»ßÔŇ‹°AĮų§U¶C•X§@≤’ľ∆ĺŕ°G 401 518 542
1461